Ball

Balls are visualized using a black and white soccer ball marker
Properties
Marker properties are utilized to visualize properties of the incoming message:
Transparency - Detection Confidence
Detection confidence is a value between 0.0 and 1.0, or unknown (-1). Transparency of the marker is proportional to the confidence. Confidence of 1.0 is completely opaque and confidence of 0.0 is completely transparent. An unknown confidence (-1), will appear as opaque, identical to a marker with 1.0 confidence.
Parameters
Configurable node parameters are:
Example
In this example, we will manually publish a ball and observe it in RViz. Start the visualizer node:
ros2 run soccer_vision_3d_rviz_markers visualizer
Set up a publisher that publishes a Ball Array message:
ros2 topic pub soccer_vision_3d/balls soccer_vision_3d_msgs/msg/BallArray "
header:
frame_id: 'camera'
balls:
- center:
x: 2.0
y: 0.0
z: 0.05
confidence:
confidence: 0.5
"
Open RViz2 with a demo configuration:
rviz2 -d $(ros2 pkg prefix --share soccer_vision_3d_rviz_markers)/rviz/demo.rviz
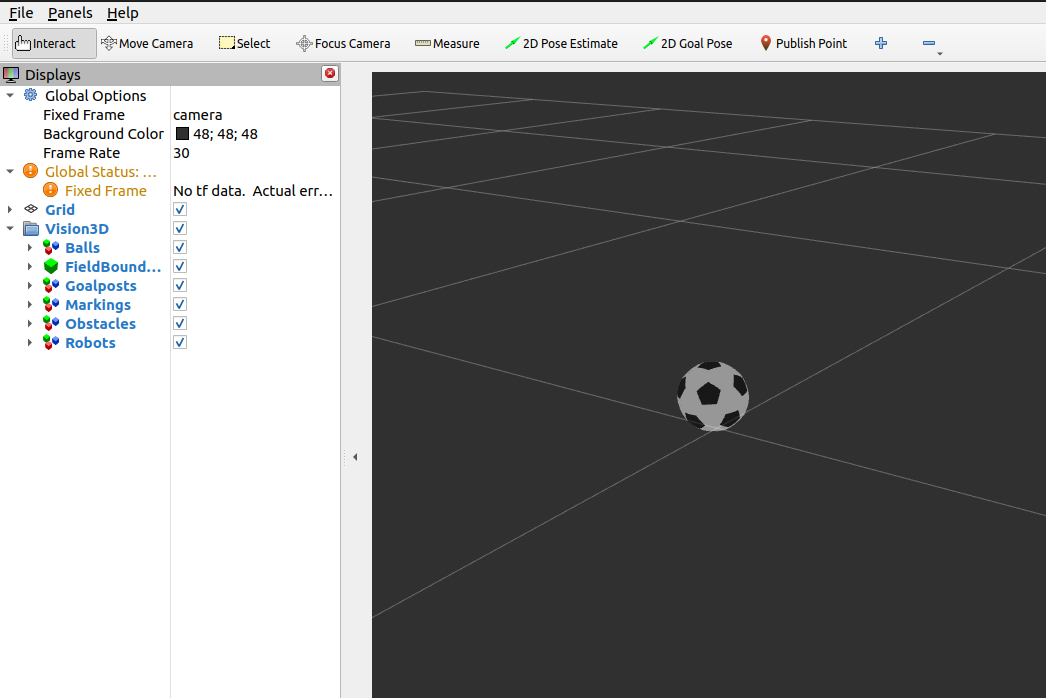
You should see a soccer ball with 50% transparency displayed in RViz: