Robot
Teammates are visualized using a green, cube marker
Opponent robots are visualized using a red, cube marker
If a robot’s team cannot be determined, visualize using a white, cube marker
The player number of the robot is displayed above the cube marker, if provided.
Properties
Marker properties are utilized to visualize properties of the incoming message:
Transparency - Detection Confidence
Detection confidence is a value between 0.0 and 1.0, or unknown (-1). Transparency of the marker is proportional to the confidence. Confidence of 1.0 is completely opaque and confidence of 0.0 is completely transparent. An unknown confidence (-1), will appear as opaque, identical to a marker with 1.0 confidence.
Color - Team
Team of a robot is classified as own, opponent or otherwise unknown. An own robot is green, opponent is red and unknown is white.
Number Marker - Player Number
Player number of a robot is displayed above the cube marker, if provided. If player number is unknown, the player number will not be displayed above the cube marker.
Example
In this example, we will manually publish a robot array with one teammate (green) and one opponent (red) and observe it in RViz. Start the visualizer node:
ros2 run soccer_vision_3d_rviz_markers visualizer
Set up a publisher that publishes the robot array with one teammate and one opponent robot:
ros2 topic pub /soccer_vision_3d/robots soccer_vision_3d_msgs/msg/RobotArray "
header:
frame_id: 'camera'
robots:
- bb:
center:
position:
x: 1.0
y: 0.5
z: 0.3
size:
x: 0.3
y: 0.3
z: 0.6
attributes:
player_number: 1
team: 1
- bb:
center:
position:
x: 1.0
y: -0.5
z: 0.2
size:
x: 0.2
y: 0.2
z: 0.4
attributes:
player_number: 3
team: 2
- bb:
center:
position:
x: 0.0
y: -1.5
z: 0.4
size:
x: 0.4
y: 0.4
z: 0.8
attributes:
player_number: 4
"
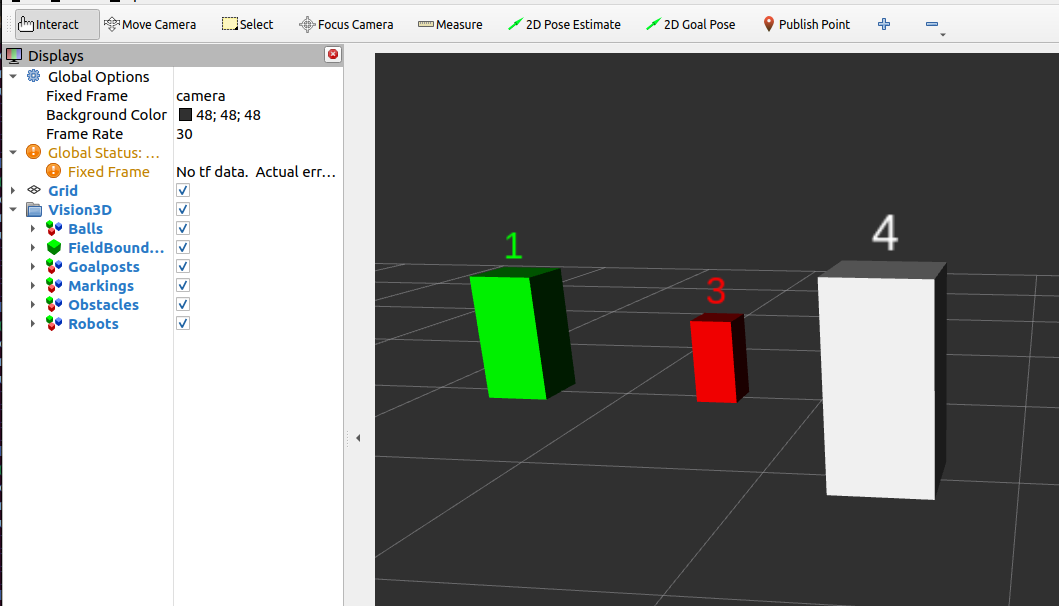
Open RViz2 with a demo configuration:
rviz2 -d $(ros2 pkg prefix --share soccer_vision_3d_rviz_markers)/rviz/demo.rviz
You should see the robots displayed in RViz: