Field Boundary
Field Boundary is visualized using a green line strip marker
Undetected field boundary is communicated using an empty array for the points property of the incoming message. No marker will be drawn if an empty array is received.
Properties
Marker properties are utilized to visualize properties of the incoming message:
Transparency - Detection Confidence
Detection confidence is a value between 0.0 and 1.0, or unknown (-1). Transparency of the marker is proportional to the confidence. Confidence of 1.0 is completely opaque and confidence of 0.0 is completely transparent. An unknown confidence (-1), will appear as opaque, identical to a marker with 1.0 confidence.
Parameters
Configurable node parameters are:
Example
In this example, we will manually publish a field boundary and observe it in RViz. Start the visualizer node:
ros2 run soccer_vision_3d_rviz_markers visualizer
Set up a publisher that publishes a Field Boundary message:
ros2 topic pub soccer_vision_3d/field_boundary soccer_vision_3d_msgs/msg/FieldBoundary "
header:
frame_id: 'camera'
points:
- x: 1.5
y: -2.0
z: 0.0
- x: 2.5
y: -2.0
z: 0.0
- x: 2.5
y: -1.0
z: 0.0
- x: 2.5
y: 0.0
z: 0.0
- x: 2.5
y: 1.0
z: 0.0
- x: 2.5
y: 2.0
z: 0.0
- x: 1.5
y: 2.0
z: 0.0
confidence:
confidence: 0.5
"
Open RViz2 with a demo configuration:
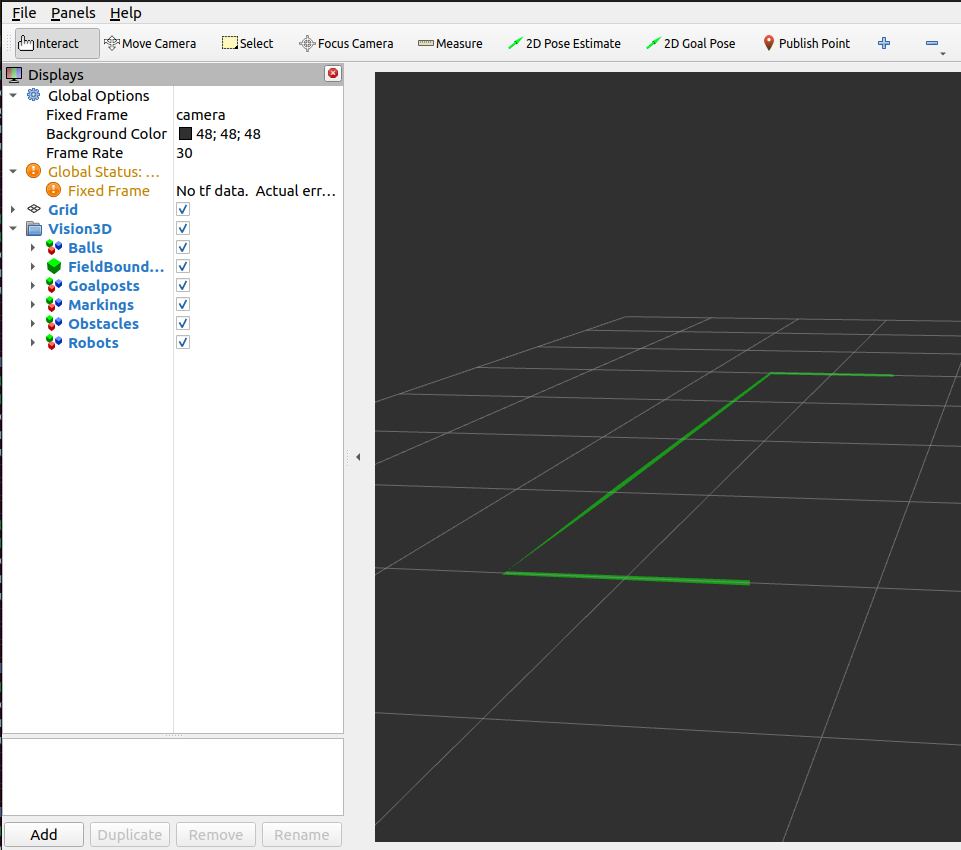
rviz2 -d $(ros2 pkg prefix --share soccer_vision_3d_rviz_markers)/rviz/demo.rviz
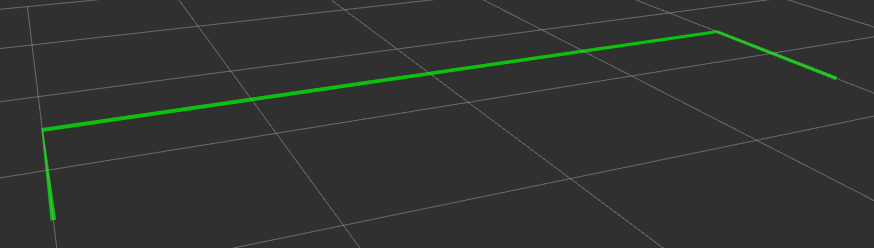
You should see a field boundary with 50% transparency displayed in RViz: